Hoy veremos en detalle que es un disco duro y para qué sirve. Es posible que hoy en día no tuviéramos ordenadores personales si no fuera por la invención de los dispositivos de almacenamiento. Es más, la tecnología no hubiera avanzado tanto si no existieran estos soportes para poder almacenar tanta cantidad de información.
Sabemos que un disco duro no es un dispositivo crítico para el funcionamiento de un ordenador, ya que este puede funcionar si él. Pero sin datos la utilidad de un ordenador es prácticamente nula.
Índice de contenidos
Poco a poco los discos duros en esta dolido o SSD está ganándole terreno a los discos duros tradicionales, que son los que vamos a tratar en este artículo. Sin embargo, esto aún presentan mayor capacidad de almacenamiento y más durabilidad. Veamos entonces, que es y cómo funciona un disco duro
Lo primero que tendremos que hacer es definir que es un disco duro. Un disco duro es un dispositivo para el almacenamiento de datos de forma no volátil, es decir, para almacenar los datos digitales utiliza un sistema de grabación magnética. De esta forma es posible mantener la información grabada en un soporte de forma permanente (de ahí que no es volátil). También se denominan discos HDD o Hard Disk Drive.
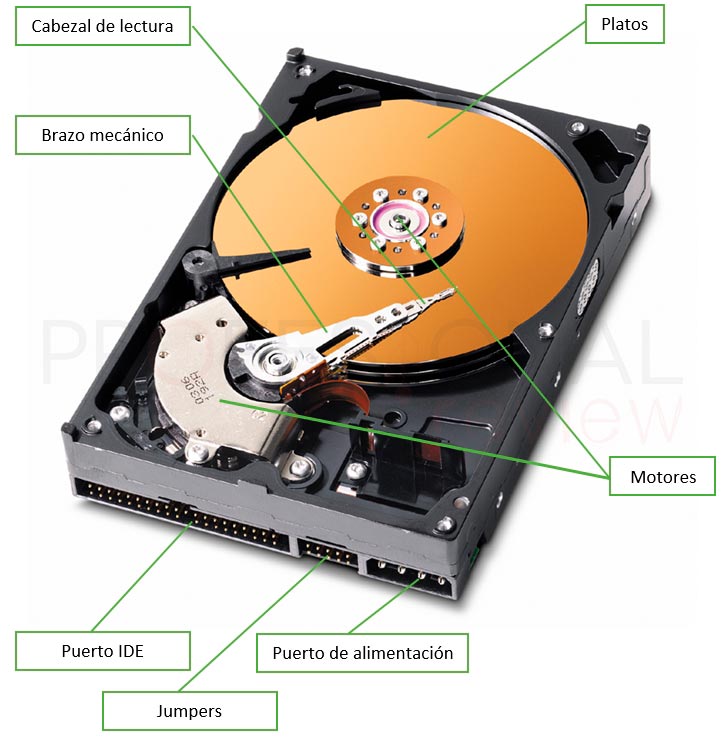
El disco duro está formado por uno o varios platos rígidos introducidos en una caja hermética y unidos por eje común que gira a gran velocidad. Sobre cada uno de los patos, que normalmente tienen sus dos caras destinadas al almacenamiento, se sitúan sendos cabezales de lectura/escritura.
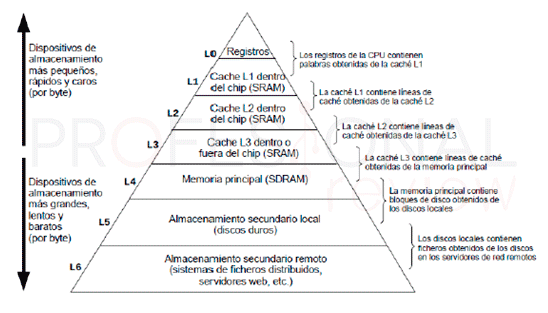
Los discos duros forman parte de la memoria segundaria del ordenador o vita en la gráfica, la memoria de nivel 5 (L5) y más abajo. Se le denomina memoria secundaria porque es la fuente de datos para que la memoria principal (memoria RAM) pueda tomarlos y trabajar con ellos enviando y recibiendo instrucciones de la CPU o procesador. Esta memoria secundaria será la de mayor capacidad disponible en un ordenador y además no será volátil. Si apagamos el ordenador la memoria RAM se vaciará, pero no un disco duro.
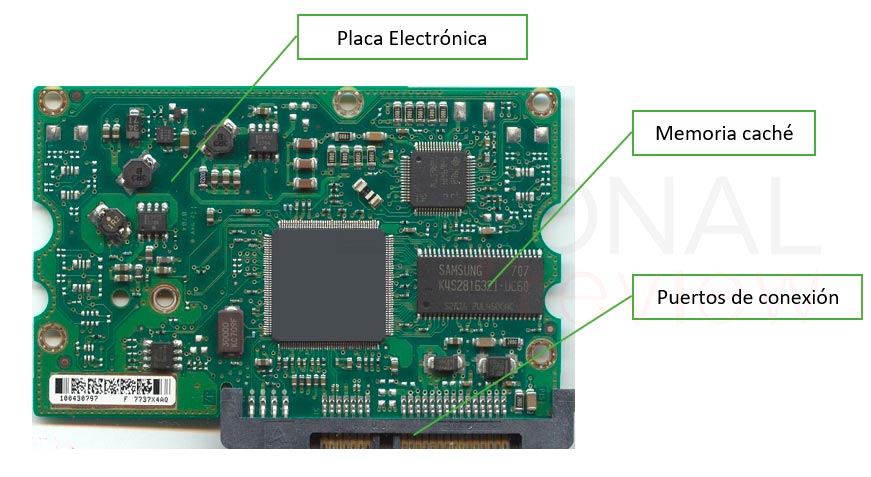
Antes de conocer el funcionamiento de un disco duro conviene enumerar y definir los distintos componentes físicos que tienen un disco duro:
El disco duro debe ir conectado a la placa base del ordenador. Existen distintas tecnologías de conexión que proporcionará unas características u oras a los discos duros.
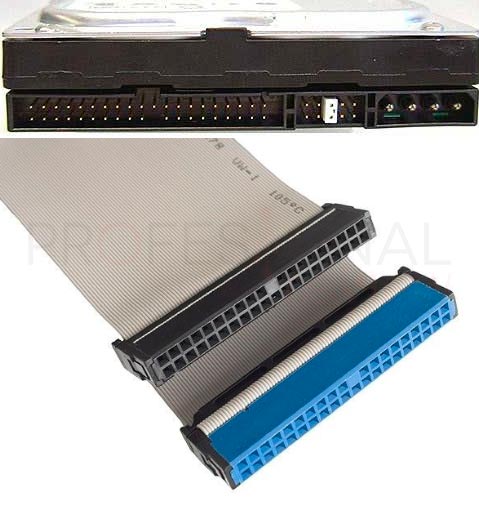
IDE (Integrated Device Electronics):
También conocido como ATA o PATA (Paralel ATA). Ha sido hasta hace poco el método estándar de conexión de los discos duros a nuestros ordenadores. Permite conectar dos o más dispositivos mediante un bus paralelo que esta forma por 40 o 80 cables.
A esta tecnología también se le conoce como DMA (Direct Memory Access), ya que permite la conexión directa entre la memoria RAM y el disco duro.
Para conectar dos dispositivos a un mismo bus será necesario que estos estén configurados como maestros o esclavos. De esta forma la controladora sabrá a quien debe enviarla datos o leer sus datos y que no exista cruzamiento de información. Esta configuración se hace mediante un jumper en el propio dispositivo.
La velocidad máxima de transferencia de una conexión IDE es de 166 MB/s. también llamada Ultra ATA/166.
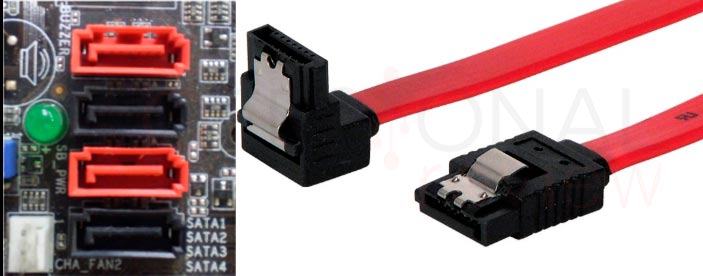
SATA (Serial ATA):
Este es el actual estándar de comunicación en los PC actuales. En este caso se utilizar un bus serie en lugar de paralelo para transmitir los datos. Es bastante más rápido que el tradicional IDE y más eficiente. Además, permite conexiones en caliente de los dispositivos y cuenta con buses mucho más pequeños y manejables.
El estándar actual se encuentra en el SATA 3 que permite transferencias de hasta 600 MB/s
SCSI (Small Computer System Interface):
Esta interfaz de tipo paralelo está diseñada para discos duros de gran capacidad de almacenamiento y grandes velocidades de rotación. Este método de conexión se ha utilizado tradicionalmente para servidores y clústers de discos duros de gran almacenamiento.
Un controlador SCSI puede trabajar simultáneamente con 7 discos duros en una conexión tipo margarita de hasta 16 dispositivos. Si máxima velocidad de transferencia es de 20 Mb/s
SAS (Serial attached SCSI):
Es la evolución de la interfaz SCSI y al igual que el SATA, es un bus que funciona en serie, aunque aún se siguen utilizando comandos de tipo SCSI para interactuar con los discos duros. Una de sus propiedades, además de las que proporciona SATA, es que se pueden conectar varios dispositivos en un mismo bus y además es capaz de proporcionar una tasa en transferencia constante para cada uno de ellos. Es posible conectar más de 16 dispositivos y cuenta con idéntica interfaz ce conexión que los discos SATA.
Su velocidad es menor que SATA, pero con mayor capacidad de conexión. Una controladora SAS puede comunicarse con un disco SATA, pero una controladora SATA no puede comunicarse con un disco SAS.
En cuanto a los factores de forma, existen varios tipos de ellos medidos en pulgadas: 8, 5´25, 3´5, 2´5, 1´8, 1 y 0´85. Aunque lo más utilizados son los de 3,5 y 2,5 pulgadas.
3,5 pulgadas:
Sus medidas son de 101,6 x 25,4 x 146 mm. Es el mismo tamaño que tienen los lectores de CD, aunque estas son más altas (41,4 mm). Estos discos duros son los que utilizamos prácticamente en todos los ordenadores de sobremesa.
2,5 pulgadas:
Sus medidas son de 69,8 x 9,5 x 100 mm, y son las medidas típicas de una lectora de disquete. Estos discos duros son utilizados para los equipos portátiles, más compactos, pequeños y livianos.
Una vez visto los componentes físicos de un disco duro, nos toca saber cómo está dividida su estructura de datos en cada plato del disco duro. Como es normal, no se trata simplemente de grabar la información aleatoriamente en el disco, estos tienen su propia estructura lógica que permiten el acceso a información concreta almacenada en ellos.
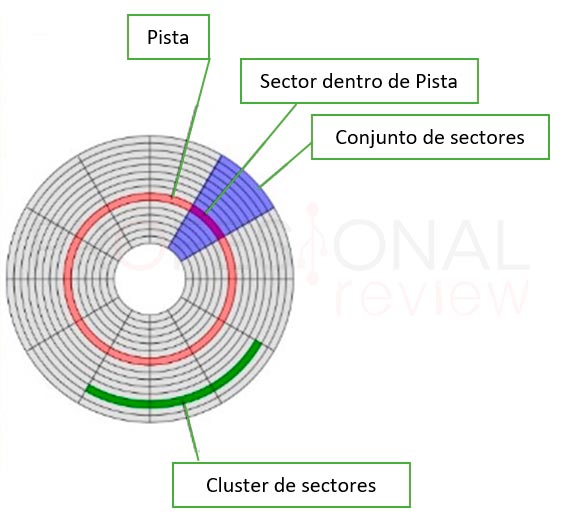
Pista (track)
Cada una de las caras del disco está dividida en anillos concéntricos, desde el interior hasta el exterior de cada cara. La pista 0 representa el borde exterior del disco duro.
Cilindro
Son el conjunto de varias pistas. Un cilindro lo forman todas las circunferencias que está alineadas en forma vertical de cada uno de los platos y caras. Formarían un cilindro imaginario en el disco duro.
Sector
Las pistas a su vez están divididas en trozos de arco llamados sectores. En estos tramos es donde se almacenan los bloques de datos. El tamaño de los sectores no es fijo, aunque lo normal es encontrarlo con una capacidad de 510 B (bytes), lo que vienen a ser 4 KB. Antiguamente el tamaño de los sectores por cada pisa era fijo, lo que hacía que las pistas exteriores con mayor diámetro quedaran desaprovechadas al tener huecos vacíos. Esto cambió con la tecnología ZBR (grabación de bits por zonas) que permite utilizar el espacio de forma más eficiente, al variar la cantidad de sectores en función del tamaño de la pista, (pistas de mayor radio, más sectores)
Cluster
También llamado unidad de asignación, es una agrupación de sectores. Cada archivo ocupará un determinado número de clústers, y ningún otro archivo podrá estar almacenado en un determinado cluster.
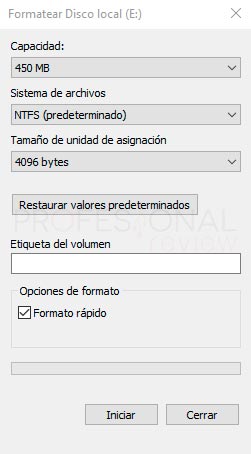
Por ejemplo, si tenemos un cluster de 4096 B y un archivo de 2700 B éste ocupará un solo cluster y además sobrará espacio en el. Pero no se podrá almacenar ningún archivo más en él. Cuando formateamos un disco duro, podemos asignar un determinado tamaño de cluster a éste, entre más pequeño sea el tamaño de clúster mejor será asignado el espacio en él, especialmente para archivos pequeños. Aunque, por el contrario, más difícil será el acceso a los datos para la cabeza lectora.
Se conseja que para unidades de almacenamiento de gran tamaño lo ideal son clústers de 4096 KB.
La estructura lógica determina la forma en la que se organizan los datos en el interior de este.
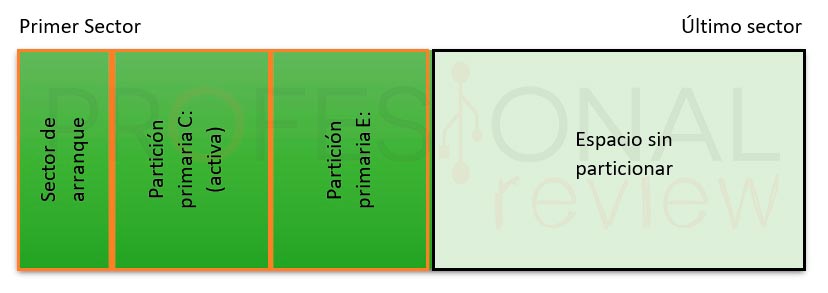
Sector de arranque (Master Boot Record):
También llamado generalmente MBR, es el primer sector de todo el disco duro, es decir, pista 0, cilindro 0 sector 1. En este espacio se almacena la tabla de particiones que contienen toda la información acerca del inicio y el final de las particiones. También tiene almacenado el programa Mester Boot, este programa es el encargado de leer esta tabla de particiones y proporcionar el control al sector de arranque de la partición activa. De esta forma el ordenador arrancará desde el sistema operativo de la partición activa.
Cuando tenemos varios sistemas operativos instalados en distintas particiones, será necesario la instalación de un gestor de arranque (bootloader) para que podamos elegir el sistema operativo que queremos arrancar.
Espacio de particiones:
El disco duro puede estar formado por una partición completa que abarca todo el disco duro, o por varias de estas. Cada partición divide el disco duro en un número determinado de cilindros y pueden tener el tamaño que nosotros deseemos asignarle. Esta información se almacenará en la tabla de particiones.
A cada una de las particiones se le asignará un nombre llamado etiqueta. En Windows será letras C: D: C:, etc. Para que una partición esté activa deberá tener un formato de archivos.
Espacio sin particionar:
También puede existir un determinado espacio que aún no hayamos particionado, es decir, que no le hayamos dado un formato de archivos. En este caso no estará disponible para almacenar archivos.
El sistema de direccionamiento permite situar la cabeza lectora en el lugar exacto en donde se encuentran los datos que pretendemos leer.
CHS (cilindro – cabeza – sector): este fue el primer sistema de direccionamiento que se utilizó. Mediante estos tres valores era posible situar la cabeza lectora en el lugar en donde está ubicado el dato. Este sistema era sencillo de entender, pero requería direcciones de posicionamiento bastante largas.
LBA (direccionamiento lógico en bloques): en este caso dividimos el disco duro en sectores y a cada uno de ellos le asignamos un número único. En este caso, la cadena de instrucción será más corta y más eficiente. Es el método que se utiliza actualmente.
Para poder almacenar archivos dentro de un disco duro, este necesita saber de qué forma irán esto almacenados., por lo que debemos definir un sistema de archivos.
FAT (File Allocate Table):
Se basa en crear una tabla de asignación de archivos que es el índice del disco. Se almacenan los clústers utilizados por cada archivo, además de los libres y los defectuosos o fragmentados. De esta forma, si los archivos están repartidos en clústers no contiguos, mediante esta tabla podremos saber dónde se encuentran.
Este sistema de archivos no puede trabajar con ¡particiones mayores a 2 GB
FAT 32:
Este sistema elimina la limitación de los 2 GB de FAT, y permite tamaños de cluster menores para mayores capacidades. Las unidades de almacenamiento USB utilizar normalmente este sistema de archivos porque es el más compatible para los distintos sistemas operativos y dispositivos multimedia como reproductores de audio o video.
Una limitación que tenemos es la de que no podremos almacenar archivos de más de 4 GB.
NTFS (New Technology File System):
Es el Sistema de archivos utilizado para sistemas operativos Windows posteriores a Windows NT. Se eliminan las limitaciones en cuando a archivos y particiones de los sistemas FAT y además toda de mayor seguridad a los archivos almacenados ya que admite cifrados de archivos y configuración de permisos de estos. además, permite la asignación de distintos tamaños de cluster para distintos tamaños de particiones.
La limitación que tienen este sistema de archivos es que no es totalmente compatible con Linux o Mac OS en versiones antiguas. Y sobre todo que no es soportado por dispositivos multimedia como reproductores de audio y video o TV.
HFS (Hierarchical File System):
Sistema desarrollado por Apple para sus sistemas operativos MAC. Es un sistema de ficheros jerárquico que divide un volumen o partición en bloque lógicos de 512 B. a su ver estos bloques están agrupados en bloques de asignación.
EXT Extended File System):
Es el sistema de archivos que utilizan los sistemas operativos Linux. Actualmente se encuentra en su versión Ext4. Este sistema es capaz de trabajan con particiones de gran tamaño y optimizar la fragmentación de archivos.
Una de sus características más sobresalientes es que es capaz de sistema de archivos anteriores a este y posteriores.
Existen distintas medidas que determina la capacidad de un disco duro en cuanto a desempeño y velocidad. Estas deben ser tenidas en cuenta para saber comparar las prestaciones de un disco duro de otro.
Si además quieres saber detalladamente más sobre hardware te recomendamos nuestros artículos:
Con esto terminamos nuestra explicación de como es un disco duro y como funciona. Esperemos que os haya resultado de mucha utilidad y ya comprendáis la importancia de tener un buen disco duro.
La aceleradora de IA H20 de Nvidia está teniendo una demanda sin precedentes de las…
Los aranceles a las importaciones impulsados por el gobierno estadounidense no están siendo aplicados a…
Nintendo confirma la compatibilidad de la consola portátil Switch 2 con las tecnologías Nvidia DLSS…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}